AT&T Bell實驗室的工程師以及科學家,發展出控制系統分析與設計的頻域方法。
故事要從Black(Harold Stephen Black,1898-1983,American electrical engineer)在1927年發明負反饋放大器說起(“反饋(feedback)”一詞被正式使用)。
第一次世界大戰后,隨著電子放大器的出現,遠距離通話成為可能。距離的增加,電能損耗也增加。為了增加傳輸距離,需要用直徑較大的傳輸線或增加放大器的個數,但放大器個數越多,因非線性以及噪聲造成的失真越大。1920年前后,放大問題已經成為開發長距離電話技術的一個嚴重阻礙。
Black當時是AT&T的工程師,他深入研究了這個問題,他發明的負反饋放大器通過把輸出的放大信號再反饋回輸入端,就可以減小由于噪聲和器件參數漂移造成的失真。

圖18 Black發明的負反饋放大器抗擾原理
雖然反饋的原理在公元前300年古希臘人和阿拉伯人發明的浮球調節裝置、17世紀的溫度調節器、18世紀工業革命的標志-瓦特蒸汽機中采用的飛球式調速器中就存在,但"反饋(feedback)"一詞被正式使用則是在Black發明負反饋放大器時。
關于Black的這個發明,有個被大家津津樂道的故事:1927年8月2日,Black前往上班途中,在Hudson河的渡船Lackawanna Ferry上靈光一閃,想出了在控制發展歷史上具有重要意義的負反饋放大器。由于手頭沒有合適的紙張,他將這個靈感記在了一份紐約時報上,這份報紙已成為一件珍貴的文物珍藏在AT&T的檔案館中。(注:在8月6日周六的上班途中,Black再次在渡船上在當天的一份紐約時報上寫了更詳細的過程)。

圖19 Black負反饋放大器的靈感來自于上班途中的靈光一現,只能將其記錄在手頭的紐約時報上
但其實為了這個靈光一現,Black持續不斷地努力了6年。1921年,Black畢業于伍斯特工業學院(Worcester Polytechnic Institute),隨后到Bell實驗室工作。作為新人,他希望盡可能多地了解公司的業務,于是查閱了大量公司文檔,發現公司當前遇到的主要問題是如何使放大器可以串聯起來把信號穩定無失真地傳到千里之外。于是,他要求承擔這項工作,他上司說“可以,但在不影響分配給他的其它工作的前提下”。于是,最初的兩年,他利用周末和晚上的時間閱讀了所有能找到的關于非線性電路方面的材料以及公司的有關文檔,后4年則幾乎無時無刻不在琢磨怎么實現一個具有線性功能的放大器,在對放大器問題進行了幾年艱苦的研究之后,這才有了1927年8月2日上班路上的靈光一現。
而從負反饋放大器的發明到其實際應用則又經歷了一段充滿荊棘的漫長路途。
為了減小失真(誤差)而引入的反饋裝置,有可能會使得系統發出尖叫(singing/oscillating)而變得不穩定(反饋的代價:系統復雜了,可能造成系統不穩定)。
這又涉及到了Maxwell和Routh研究過的穩定性問題,但這時,系統的動態特性已經很復雜(通常是幾十階的高階微分方程),Routh判據很難再有幫助。貝爾電話實驗室的通信工程師和科學家們開始考慮用頻率響應(frequency response)和復變函數理論進行分析,發展出了控制系統分析與設計的頻域方法。
負反饋放大器的發明及其發展被認為是發明家、工程師與受過良好數學物理訓練的理論研究團隊成功合作的杰出案例,其中有2個代表性人物:Harry Nyquist(1889-1976)和Hendrik Bode(1905-1982)。
H. Nyquist,1917年獲得耶魯大學物理學博士學位,1917-1934年就職于AT&T。1928年,Nyquist與AT&T的其他一些工程師一起與Black商討如何將負反饋放大器用于一種新的電纜通信系統。他做了負反饋系統的分析,并最終在頻域上建立了一個與已有工作完全不同的穩定性判據-Nyquist判據,Nyquist判據可以直接指導如何調整控制器確保系統穩定。
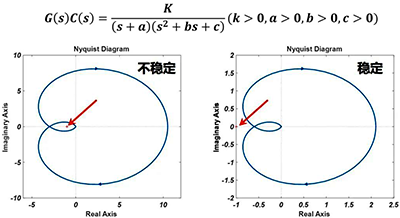
圖20 Nyquist在頻域上建立了一個與已有工作完全不同的穩定性判據-Nyquist穩定判據
H. Bode,1926年獲得Ohio State University數學碩士學位,然后就職于Bell實驗室,期間又于1935年取得Columbia University物理博士學位。1928年,在開發一種新的同軸電纜通信系統時,Bode帶領一組數學家研究能充分利用Black放大器優點的系統設計方法。1940年,Bode在其經典論文“Relations between attenuation and phase in feedback amplifier design”中進一步提出了利用頻域的Bode圖、幅值裕度/相位裕度等相對穩定性概念來設計負反饋放大器的方法,并指出了系統增益與帶寬的極限關系。
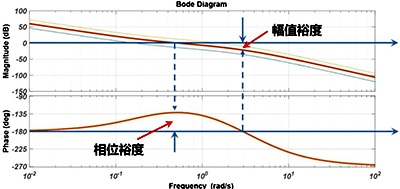
圖21 Bode圖:通過頻域的幅值裕度/相位裕度分析系統穩定性
二戰中,Bode參加了高射炮控制系統的研制,他參與研制的高射炮在1944年的安齊奧戰役(Battle of Anzio)和諾曼底登陸時都發揮了很大的威力。他的研究工作一直持續到美國太空計劃時代,是一位在學術界廣受尊重的科學家。Bode去世后,1989年IEEE控制系統協會(IEEE Control System Society,IEEECSS)設立Bode Lecture Prize以表彰對控制系統科學和工程做出突出貢獻的人。2019年中國科學院系統控制重點實驗室郭雷院士“因在自適應控制、系統辨識、自適應信號處理、隨機系統及應用數學領域的根本性和實際性貢獻”被授予Bode Lecture Prize,是該獎設立30年以來,中國和世界華人中第一位獲此榮譽者。
2019年中國科學院系統控制重點實驗室郭雷院士被授予Bode Lecture Prize,是該獎設立30年以來,中國和世界華人中第一位獲此榮譽者。
AT&T Bell實驗室的工程師以及科學家團隊的這些工作最終發展為控制系統分析與設計的頻域方法。
控制系統分析與設計的頻域方法至今還是控制工程師們最喜歡和信賴的一種方法,仍然在廣泛應用。頻域方法可以擺脫處理微分方程的困難,直接通過系統頻域響應的實驗數據進行控制系統的分析與設計。
還有一個重要原因是,雖然穩定性是控制系統設計中首當其沖的問題,但系統僅有穩定性是不夠的,一個好的控制系統除了需要具有穩定性外,還應兼顧快速性、準確性、抗擾性等可能彼此沖突的性能指標,頻域設計可以比較清楚地通過系統的頻率響應Bode圖同時在不同頻段兼顧各項指標進行設計,簡明而直接。

圖22 控制系統多項指標可以通過頻域方法簡明且直接地進行分析與設計
第2個群體在美國過程工業領域,系統地建立和開發了控制系統設計方法,代表性工作:PI及PID控制的Ziegler-Nichols調整法
20世紀30~40年代,美國過程工業中的工程師和科學家開始系統地建立和開發控制系統設計方法,一個代表性工作是J.G.Ziegler和N.B.Nichols在1942年提出了PI及PID控制的參數整定方法,后來被稱為Ziegler-Nichols調整法。
第3個群體在麻省理工學院(MIT)的電子工程系, 設計了微分方程模擬計算機,進行控制系統仿真。
1930s,Vannevar Bush在MIT帶領Harold Hazen,Gordon Brown和Claude Shannon設計了微分方程模擬計算機(the differential analyzer),從而可以進行動態系統仿真。其后,Harold Hazen和 Gordon Brown領導的小組利用模擬計算機進行了控制系統的時域仿真。
關于控制系統的計算機仿真這項工作要不要在控制發展史里介紹筆者自己也反復過幾次,中間有幾次上課沒有講。后來,發現控制室的學生大多本科是學數學的,不太喜歡計算機仿真,反而覺得有必要給學生們強調一下計算機仿真的重要性。
隨著計算機技術的快速發展,計算機仿真在控制研究中已經發揮著越來越重要的作用,不僅僅是指學術論文中那種簡單的仿真,雖然現在仿真已經是大部分論文中的一個重要環節,計算機仿真更重要的價值還在于:
1、可以直接啟發新的研究思路和靈感,當然由仿真啟發的新方法還需要經過艱難的嚴格理論論證和嚴苛的物理實驗的考驗。
2、論證控制方法的重要手段。如今控制問題變得越來越復雜,需要考慮的因素越來越多,傳統的理論分析手段難以徹底解決問題時,詳盡充分的計算機仿真已成為論證控制方法的重要手段。比如,在航天工程中研究新的飛行方案時,穩定裕度分析往往還需要結合大量拉偏參數以及考慮各種物理器件約束的計算機仿真驗證。因此,我們也許應該思考理論分析的內涵是不是也應該隨之與時俱進。
二戰后,經典控制技術基本建立起來
二戰的爆發使控制系統的工作集中在幾個特別的問題上,最重要的一個是防空高射炮瞄準系統(aiming of anti-aircraft guns)。這是一個復雜的問題,需要完成快速發現飛行目標、準確預報飛行目標的位置、精確瞄準等一系列動作。為了完成這個任務,需要將雷達跟蹤系統(automatic tracking radar system)直接與射擊指揮儀(gun director)并最終與炮火位置控制器(gun position controller)相連。
為此,美國集中了當時的機械、電力電子、通信等各方面的工程師和科學家通力協作來完成這一系統,如SCR-584雷達系統(SCR-584 radar system)由MIT雷達實驗室研制,M9射擊指揮儀(M9 director)則由Bell實驗室集合C.A.Lovell,D.B. Parkinson,Bode,R.C. Blackman,Claude Shannon等人研制。
這是一次成功的合作,這個系統在1944年6月-8月英國東南部抗擊德國V-1火箭空襲中獲得了很高的成功率,擊落了上千枚V-1火箭。
V-1火箭被認為是第一個可操作的自動化機器炸彈*注2(the first operational robot bomb),飛行速度快且高度低,對炮火有很強的抵抗力。
1944年的倫敦空戰被認為是自動機戰爭的開端(the beginning of the first battle of the robots):由SCR-584 雷達、M9 射擊指揮儀、炮臺組合成自動控制系統發射帶有近身引信(the Proximity fuze)的VT(variable time)robot與V-1 robot的抗爭。
*注2:2018年7月,蘇劍波邀請高志強和我在上海交大講授了一次“自抗擾控制技術”的暑期課程,其中有個單元是蘇劍波講機器人,他的開場白讓我印象深刻,說他讀碩士學位時曾經不喜歡機器人這個方向,因為覺得“那時的robot根本就沒人樣!”。這里把robot翻譯成機器人似乎也不合適,翻了下字典,robot原文為能自動運動的機器(a mechanism that can move automatically)。
戰后,經典控制技術基本建立起來了,是一種針對單輸入線性定常系統的設計方法。主要有以微分方程描述的系統特征根、以及上升時間、超調、穩態誤差和阻尼等指標表述系統性能的時域方法,和以帶寬、諧振、幅值/相位裕度以及頻域響應圖展示系統行為的頻域方法,有人喜歡時域方法,因為可以直觀了解系統的實時行為,而二戰中的工作充分顯示了頻域響應方法在反饋系統設計上的威力。
戰爭中解決防空控制問題的經歷也使人們進一步認識到:
1、將幾種由不同小組設計的部件集成在一起工作時,整個系統的性能就不那么依賴各個獨立單元的性能,而在于它們是否能很好地協同工作。
2、無論是通訊工程師擅長使用的頻域方法還是機械工程師喜歡的時域方法都不足以完成設計,所需要的是能綜合兩者優點的方法。
3、基于線性和確定性假設進行的控制系統設計存在局限,因為,實際系統都是非線性的,測量包含誤差和噪聲,過程和環境存在不確定性,帶寬的約束、噪聲的影響、以及非線性特性都會給系統設計帶來困難。
二戰的防空問題與維納的“控制論(Cybernetics)”
二戰中的防空問題還促成了另一個重要的進展:維納(Norbert Wiener,1894-1964)的“控制論(Cybernetics)”。
1940-1945年5年內,美國國防研究委員會火控部(fire control division,National Defense Research Committee)一共資助了80個研究項目,經費數目最大也是最成功的一個($1.5million)是Bell實驗室的M-9射擊指揮儀,經費最小的一個項目($2325)是給維納的“預測目標飛行模式(how to predict flight patterns)”,維納從隨機系統的角度進行研究。
雖然維納的項目研究并未真正用于實際,但這個工作促使他進一步思考有關反饋、信息、控制、輸入、輸出、自我平衡、預測和濾波(feedback, information,control,input,output,stability,homeostasis,prediction,and filtering)等問題,并最終創立cybernetics(1948年出版了cybernetics這本著作。
維納的Cybernetics學說既有理性的抽象概念如控制、反饋,也有豐富的想象力,如在人機關系方面,人與機器的融合,將機器擬人化以及人機械化。Cybernetics發表后,馬上被認為是一種新思想甚至新興學科,而吸引了工程、數學、生物、心理甚至社會、哲學、政治等眾多領域的極大關注。
許多人認為維納的cybernetics不應該翻譯成“控制論”,從書名就可看出cybernetics具有控制、通訊以及人機交互等多重含義,翻譯成控制論只取了其中控制的部分。現在人工智能又熱了起來,也有人認為維納的cybernetics其實就是描述的人工智能。
走馬觀花最后一站:飽受爭議的現代控制理論
戰后控制科學的發展更主要的受到2大因素的推動:一是美蘇太空競賽,二是數字計算機的出現,可以完成復雜的計算和動態系統仿真。
航天任務需要研究解決導彈與太空飛行器的發射(launching)、機動(maneuvering)、制導(guidance)及跟蹤(tracking)等問題,這個問題的特點是物理模型可以用一組一階微分方程(線性或非線性)描述,再就是航天器上裝有具備良好精度的測量裝置(傳感器)用于狀態測量、軌跡規劃,于是發展出狀態空間方法。
航天控制系統,比以往的控制系統復雜多了。圖5展示了控制系統的幾個基本組成,在最初的簡單控制系統里,如水鐘、飛球式調速器,量測、控制量、執行機構是一體的,控制目標也比較簡單。而航天的控制系統跟以往控制系統相比要復雜得多,飛行任務往往需要導航、制導和控制三部分協同完成。
對應控制系統基本組成框架,導航系統相當于測量部分,完成傳感器測量及傳感器信號的處理,以實時準確地提供飛行器在飛行當中的各種狀態(位置、速度、姿態、角速度等);制導系統對應于給出預期運動指令的部分,根據飛行最終任務實時規劃出當前飛行狀態需要如何調整的指令值(通常為姿態指令),即此時期望輸入是實時生成的而不是事先確定的;最后的關鍵就是控制系統根據導航系統提供的當前飛行狀態和制導系統提出的運動指令形成控制量調整飛行狀態。
航天任務的需求強力推動了現代控制理論的發展,Bellman的動態規劃、Pontryagin的極大值原理和Kalman濾波被認為是現代控制理論的三個代表性工作。
1948年-1952年,Bellman(Richard Bellman,1920-1984)在蘭德公司(Rand Corporation)數學部工作,他在研究解決導彈部署以達到最大破壞力問題的過程中,提出了“最優性原理(principle of optimality)”和“動態規劃(dynamic programming)”。
Pontryagin(Lev Semenovich Pontryagin,1908-1988)是蘇聯數學家,航天飛行任務除了落點精度的要求外,系統性能還涉及一些其他限制: 如時間最短或燃料消耗最少等,Pontryagin 1956年提出的極大值原理是關于這類最優控制問題的理論基礎。
Kalman濾波則是從帶有噪聲以及不完全測量的信號中提取所需信號的一種數學算法,Kalman濾波剛提出時曾受到很大質疑,直到1960年,Kalman(Rudolf Emil Kalman,1930-2016)訪問NASA Ames研究中心,其后Kalman濾波成功地在阿波羅登月計劃中得以應用。
文獻把現代控制理論的起點放在1956年,那年在德國海得堡召開了一次自動控制的國際會議,很多國家的學術與工業界代表參加了會議。會上,一些代表提議成立一個國際組織來推動自動控制的發展,就是1957年9月在巴黎正式成立的國際自動控制聯合會(IFAC),前蘇聯申請了1960年在莫斯科召開第一次IFAC世界大會。因此,也有把1960年第一屆IFAC世界大會的召開作為現代控制理論起點的一個重要標志。
IFAC是一個以國家組織為其成員的國際性學術組織,中國為其創始成員國。
1960年6.27-7.2,第1屆IFAC世界大會在莫斯科召開,1500名控制工程師和科學家齊聚莫斯科,會上有285篇論文進行了交流,不乏經典之作,如:
1.Boltyanski, Gamkrelidze, Mishchenko, and Pontryagin: ”The maximum principle in the theory of optimal processes of control”
2.R. Bellmanand R. Kalaba:”Dynamic program and feedback control”
3.R.E.Kalman:”On the General Theory of Control Systems”
此后,IFAC世界大會每3年舉辦一次,1999年第14屆IFAC世界大會在北京召開。
讀到這段歷史時,筆者總感覺以一次會議或組織的成立作為一個學科新階段的起點似乎理由不夠充分,還是更應該看有什么新進展。為什么上述三項工作被稱為現代控制理論的代表性工作是筆者在研究生剛入學時就一直有的疑問,幾十年了,而現代控制理論在這幾十年里也飽受不接地氣的批評。2017年接到給北京五中學生以“數學與航天”為題講一次課的任務,苦惱了很久,不知從哪破題,苦思冥想中,忽然對自己這個幾十年前的疑問有了不同的認識。追根朔源,Kalman濾波比較好地解決了航天導航系統里的信息處理問題,而最優控制其實是期望解決航天制導系統的實時軌線規劃問題。因此,根據導航、制導與控制的關系,這三個代表性工作并不是解決傳統意義上的控制問題,而是傳統控制中沒有涉及的部分,即狀態信息的提取和控制輸入指令的規劃。所以,可以說現代控制理論拓展了傳統意義下控制研究的范疇,但對解決傳統意義上的控制問題沒有大的推動,依然是以PID為主的經典控制技術占主導,而現代控制理論里那些試圖解決傳統意義上控制問題的嘗試似乎都不太成功,這是需要我們深思的。前面提到的自抗擾控制則汲取并拓展了現代控制理論信息處理中狀態的概念和觀測器的方法,在解決傳統控制問題上突破了現有理論和方法的局限性。作為在PID控制基礎上的創新,自抗擾控制已經實際應用于我國航天航空多個新型飛行器的飛行控制,以及我國一些電廠的控制回路中,而其未來的發展,也許應該思考如何擴展到更廣的領域。
走馬觀花地回顧了控制歷史之后,歷史給我們哪些啟發呢?筆者自己的幾點感受:
1、控制科學是在解決實際問題中不斷發展的
Maxwell系統地分析反饋控制穩定性的工作是具體針對當時調速器的穩定性問題,引申發展出來的;Black, Nyquist和Bode等人的頻域分析與設計方法是為具體解決通訊快速發展中出現的穩定性問題而發展起來的,甚至現代控制理論也是由于太空計劃中的一系列難題推動的。因此,控制的研究要針對實際問題,對所研究的問題要有透徹的了解,在創造性地解決問題中做出原創性的工作。
2、歷史人物天才式貢獻的背后是對鉆研的熱情和持續不斷的努力
走馬觀花中愉快地在歷史人物間穿行,流連忘返,被他們帶著去探索各種問題,這是特別吸引筆者的部分,常常會有“他是怎么想出來的”的好奇,在這個過程中既感嘆于他們的博學和才華,也被他們鉆研的熱情和執著所打動,任何一點進展都不是一蹴而就的。
3、控制系統的研究通常在時域/復數域/頻域多個域中展開
時域的狀態空間和微分方程分析,復數域的傳遞函數和零極點分析,以及頻率域的帶寬和幅值/相位裕度分析,每一種方法都有其適用的范圍、優點和局限,最好能綜合掌握、靈活運用。







