昌暉儀表通俗介紹雙增益PID的控制原理,控制特點和具體應用,豐富大家對的PID控制知識,對選擇調節器和用好調節器大有幫助。
理論之樹是用來指引方向的,不是用來吊死的。老文青歌德曾經是小文青,在法院里抄抄寫寫,憑著家族關系本可以在司法界混一碗好飯。但風流年少的歌德被告了一惡狀,蹲進大獄,突然茅塞頓開,寫出不朽名作《少年維特之煩惱》。但歌德的另一句話更有名:理論是灰色的,生命之樹常青。PID就像生命之樹一樣,枝繁葉茂。在實踐中,PID有很多表兄弟,幫著大表哥一塊打天下。
比例控制的特點是,偏差大,控制作用就大。但在實際中有時還嫌不夠,最好偏差大的時候,比例增益也適當加料,進一步加強對大偏差的矯正作用,及早把系統拉回到設定值附近;偏差小的時候,當然就不用那么急吼吼,慢慢來就行了,所以增益減小一點,加強穩定性。這就是雙增益PID(也叫作雙模式PID)的起源。想想也對,昌暉儀表以高射炮瞄準敵機為例,如果炮管還在離目標很遠的角度,那應該先盡快地把炮管轉到目標角度附近,動作猛一點才好,這時穩定性和控制精度都不是主要問題;但炮管指向已經離目標很近的時候,動作就要慢下來,精細瞄準,要不然炮管指向由于高增益晃來晃去,反而瞄不準敵機。工業上也有很多類似的應用。
雙增益PID的一個特例是死區PID(PID with Dead Band),小偏差時增益為零,也就是說,測量值和設定值相差不大的時候,就隨它去,鎖定控制量,實際上就是不加控制。這在水庫的水位控制里用得很多。水庫不僅用來蓄水,還可以用來緩沖流量變化,水位到底精確控制在100.5m還是118.7m并不緊要,需要的是大概在110m樣子,最主要的是不能高于140m上限或者低于80m下線。但是,從水庫流向下游的流量要盡可能平穩,否則下游流域的水流忽大忽小,會不必要地影響流域人民的生產和生活,也對魚蝦蟲鳥的生態不利。死區PID對這樣的控制問題是最合適的。但是天下沒有免費的午餐。死區PID的前提是液位在一般情況下會“自然”穩定在死區內,如果死區設置不當,或系統經常受到大幅度的擾動,死區內的“無控”狀態會導致液位不受抑制地向死區邊界“挺進”,最后進入“受控”區時,控制作用“輕輕一拍”,但難以正好把液位拍進死區而停在那里,而是容易過頭,使液位向相反方向不受抑制地“挺進”。最后的結果是液位永遠在死區的兩端振蕩,而永遠不會穩定下來,永遠擺動下去。雙增益PID也有同樣的問題,只是比死區PID好一些,畢竟只有“強控制”和“弱控制”的差別,而沒有“無控區”。在實用中,雙增益的內外增益差別小于1:2沒有多大意義,大于1:5就要注意上述的持續振蕩或擺動問題。
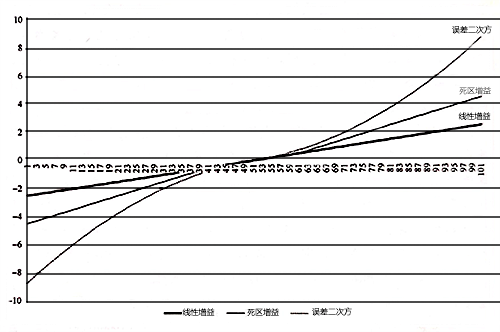
圖1 雙增益PID在誤差接近于零的時候為低增益(斜率較低),在誤差較大的時候為高增益(斜率較高);誤差二次方有類似的特征,但增益變化是連續的
雙增益或死區PID的問題在于增益的變化是不連續的,控制作用在死區邊界上有一個突然的變化,容易誘發系統的不利響應,二次方誤差PID就沒有這個問題。誤差一經二次方,控制量對誤差的響應就成了拋物線,同樣可以達到“小偏差小增益、大偏差大增益”的效果,還沒有突然的、不連續的增益變化。但是誤差二次方有兩個問題:一是誤差接近于零的時候,增益也接近于零,回到上面死區PID的問題;二是很難控制拋物線的具體形狀,或者說,很難制定增益在什么地方拐彎,拐彎有多急。對于第一個問題,可以在誤差二次方PID上迭加一個基本的線性PID,使零誤差時增益不為零;對于后一個問題,可以考慮采用帶圓滑轉角的雙增益(見圖2)。

圖2 帶圓滑轉角的雙增益,既實現雙增益,又保證圓滑過渡
雙增益有兩個值高值和低值,用圖形表示有兩種表示法。一是輸出對輸入的關系,斜率對應于增益,這就是三折線:中間的內段斜率較小,對應于低增益;兩側的外段斜率較大,對應于高增益。還有一個圖形表示方法是增益對輸入,那就好像一個壕溝的剖面,溝底對應于低增益,地面對應于高增益,而溝壁是上下垂直的,代表兩個增益值之間的不連續過渡。如果溝壁是斜坡,這個斜坡就對應了雙增益之間的連續過渡。換到用輸入對輸出的圖形表示的話,溝壁斜坡就對應于內外段折線之間的圓角過渡,斜坡越緩,圓角越大。這個路子的潛力很大,要是“野心”大一點,再加幾個計算單元,還可以做出不對稱的增益,也就是說,升溫時增益低一點,降溫時增益高一點,以處理加熱過程中常見的升溫快、降溫慢的不對稱增益問題。
雙增益或誤差二次方都是在比例增益上做文章,同樣的“勾當”也可以用在積分和微分上。更極端的一種PID規律叫作積分分離,其思路是這樣的:比例控制的穩定性好,響應快,所以偏差大的時候,把PID中的積分關閉掉,消除積分的滯后影響,加速偏差歸零;偏差小的時候,精細調整、消除余差是主要問題,所以減弱甚至關閉比例作用,而以積分作用作為主要控制。這個概念是好的,但具體實施的時候,有很多無擾動切換和初始化的問題。
從雙增益和誤差二次方更進一步,就是自適應增益(Gain Scheduling)。經驗告訴我們,在不同工藝條件下,增益要隨之調整。如果有相對確定的關系,比如系統通過流量為100t/h的話,加熱回路的增益應該為3.0;上升到200t/h的話,增益就應該相應降低到2.0;諸如此類。有這樣明確的增益調整關系的話,不難實現增益的自動調整。有意思的是,自適應增益在概念上不深奧,在道理上也很容易接受,但在實踐中很少使用。關鍵還是人們對自動調整增益這樣重要的控制參數不放心,回路特性太復雜,出了問題的話,死都不知道怎么死的。
雙增益PID和自適應PID在理論上很難分析系統的穩定性,在實用中卻解決了很多困難的問題,但在教科書和主流參考書中卻很少提及。在昌暉儀表生產的調節器產品中,64段液晶可編程調節器采用的就是雙區PID控制,抑制超調,提高控制精度。






