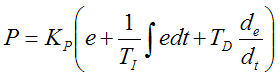
公式中:P為控制器的輸出信號(hào);e為偏差信號(hào);KP、TI、TD分別是控制器的比例增益、積分時(shí)間和微分時(shí)間。
當(dāng)采集周期T0相對(duì)于輸入信號(hào)變化周期很小時(shí),可用矩形法來求積分的近似值,用一階的差分來代替微分。經(jīng)替換最終就可得到離散PID的表達(dá)式,離散PID的表達(dá)式通常有:位置型,即PID運(yùn)算控制調(diào)節(jié)閥的開度;增量型,即PID運(yùn)算控制調(diào)節(jié)閥開度的增量(閥位的改變量);速度型,即PID運(yùn)算控制伺服機(jī)的旋轉(zhuǎn)速度。在計(jì)算機(jī)控制中增量型算式由于易于實(shí)現(xiàn)手動(dòng)和自動(dòng)的無擾動(dòng)切換,比較容易克服積分飽和,得到廣泛的應(yīng)用,其表達(dá)式如下:

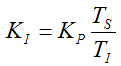
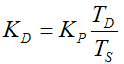
公式中:△Pn為第n次控制器輸出對(duì)前次控制器輸出的增量;en為第n次采樣的偏差;KI為積分系數(shù),TS為采樣周期;KD為微分系數(shù)
由于數(shù)字PID控制比模擬控制更容易實(shí)現(xiàn)各種算法,所以為了改善控制質(zhì)量,在實(shí)際應(yīng)用中對(duì)PID算式進(jìn)行了改進(jìn),如不完全微分型算式、微分先行PID控制算式、積分分離的PID算式等,都獲得了很好的控制效果。






